A Totally Cool Robot I Made
Notes for new post
-
Improvement over old bot -- show vid
-
Goals: smoother balancing, remote control (fun!). I want to be able to re-use as much of this as possible in future projects (robot arms, robo dogs?)
-
Hardware: better IMU, BLDC, Perfboard, pwoer tool battery, direct drive (no gearing for now), begin making the motor "platform" that can be reused for future bots, Teensy(?)
-
Software: probably PID, but allow tie in with RL
-
BLDCs
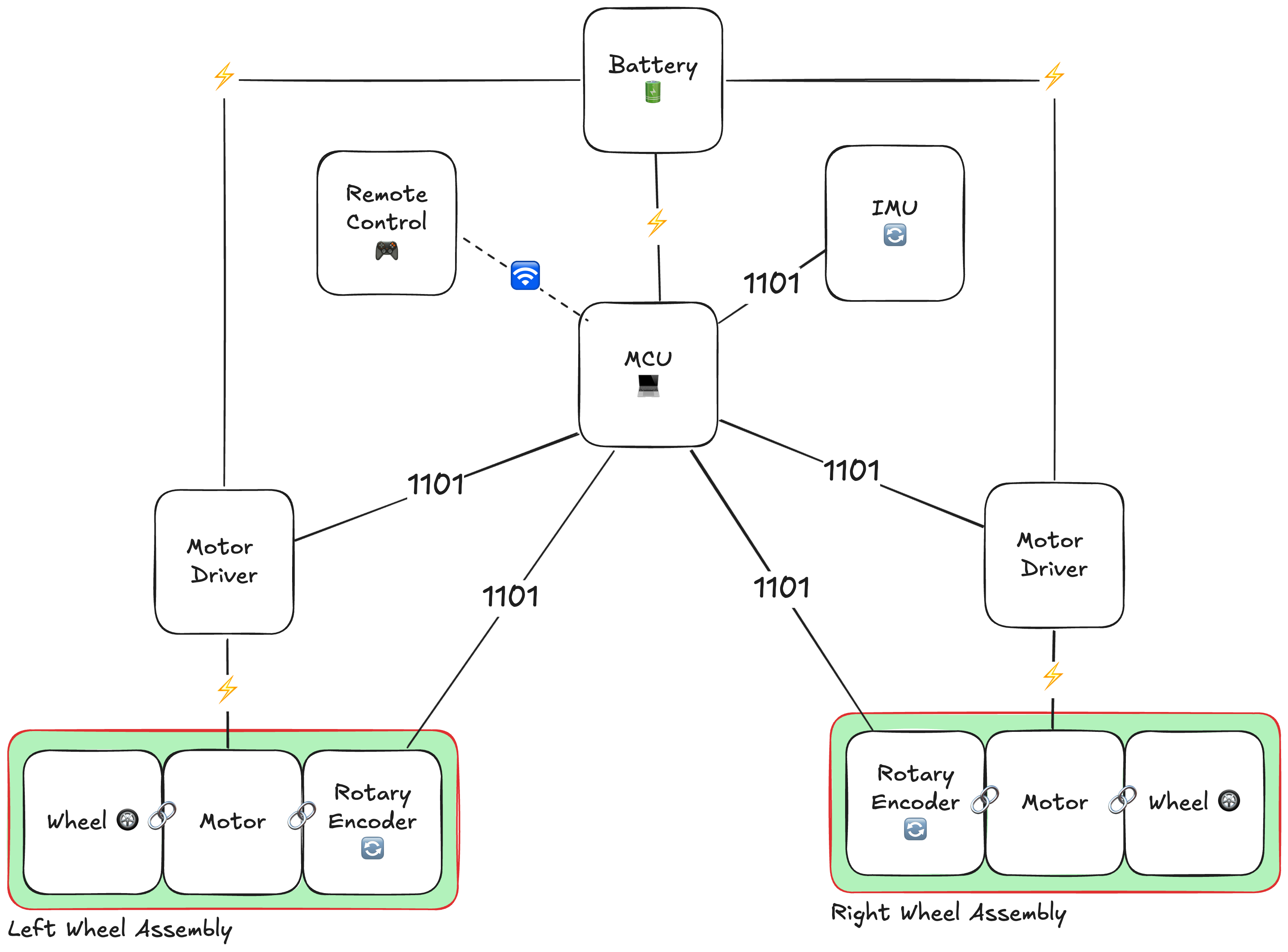
choosing the battery. choosing the motors. choosing the drivers. choosing the rotary encoder. the imu. the mcu.
Motor Drivers
Motors / Wheels
Starting with wheels I have a set of 62.5mm diameter wheels and an 80m set. Assuming the robot is approximately 1kg
Getting Started
I made a robot and it was cool and stuff.
Here are some reasons it is cool.
- It's blue
- It's a robot
- It's blue
How it works
void makeRobotGo() {
robot.go();
}
makeRobotGo();
Images
Here is a picture of a robot arm base for some reason

Videos
Yo check out this robot video